|
|
Скоро!Событий нет.
|
Главная » Техническая информация » Статьи » Установка компонентов на устройства 3D-MID: концепции современного сборочного оборудования. Часть II
15 декабря 2011
Установка компонентов на устройства 3D-MID: концепции современного сборочного оборудования. Часть IIОглавление:
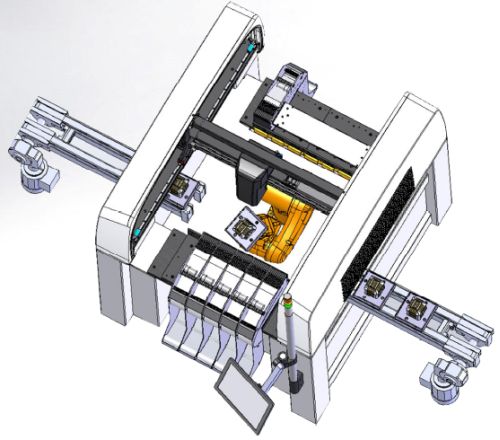
Модульный автомат, оснащенный 3D-держаталем монтажных основанийЕще одной реализацией возможности сборки устройств 3D-MID является концепция модульного автомата, оснащаемого в качестве модуля расширения 3D-держаталем монтажных оснований. Примером может служить система трехмерной микросборки VICO 520 M от компании Häcker Automation GmbH (рис. 5). Это модульное оборудование обладает различным гибко конфигурируемым оснащением для решения задач микросборки, нано- и микродозирования и оптической 3D-инспекции [7].
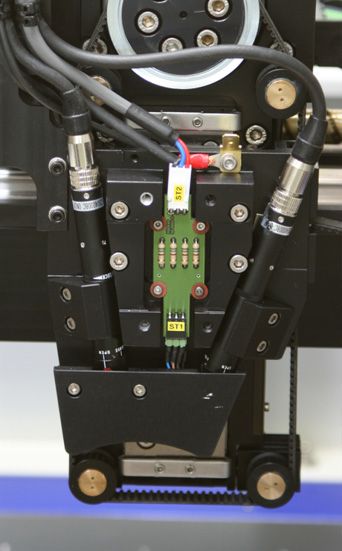
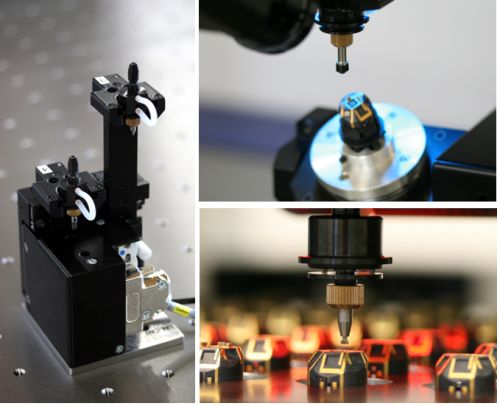
Рис. 5. Система трехмерной микросборки VICO 520 M. Источник: [7]. Стандартным оснащением системы VICO 520 M является стереоскопическая система трехмерного технического зрения (рис. 6). Для компенсации возникающих погрешностей изготовления и позиционирования СТЗ автомата определяет положение монтажного основания в пределах рабочей зоны автомата не только в плоскости, но и по вертикали [7].
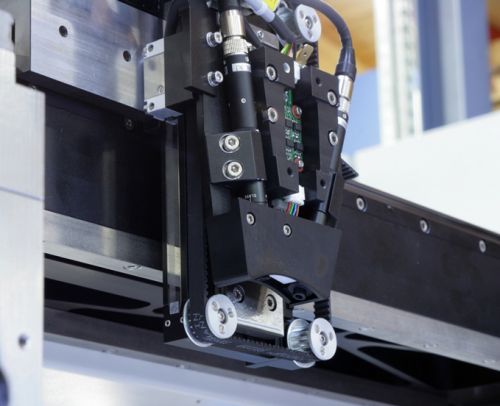
Рис. 6. Стереоскопическая система трехмерного технического зрения оборудования VICO 520 M. Источник: [9]. СТЗ выполнена на основе двух расположенных под углом камер, каждая из которых обозревает объект с различных ракурсов (рис. 7). ПО автомата вычисляет точное положение объекта в декартовой прямоугольной системе координат, причем не только в плоскости, но и по вертикали в пределах рабочей области, и даже определяет состояние поверхности. Областью поиска 3D СТЗ является куб с длиной стороны 2,5 мм, точность ±2 мкм. Система оснащена алгоритмом компенсации дефектов структуры поверхности с размерами вплоть до 250 мкм и обладает возможностью проводить АОИ готовых сборок [8, 9].
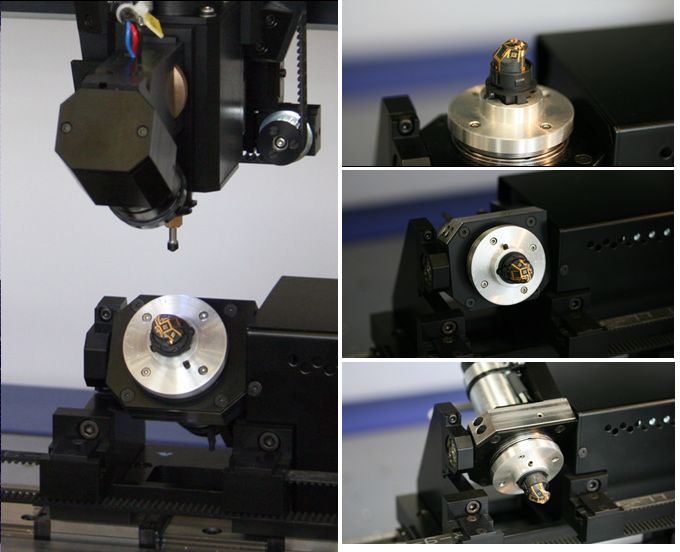
Рис. 7. Обзор объекта двумя камерами СТЗ оборудования VICO 520 M. Источник: [9]. 3D-оснастка для фиксации монтажных оснований – модуль расширения для модели VICO 520 M. Две оси модуля могут управляться независимо друг от друга. Рабочая область может поворачиваться на 360° вокруг оси Z и наклоняться вплоть до 90° по оси X, что добавляет две недостающие степени свободы к четырем, обеспечиваемым сборочной головкой. Таким образом, можно управлять положением устройства 3D-MID, устанавливая его выпуклую/вогнутую поверхность в требуемую для установки компонентов позицию с помощью поворота и наклона. При этом головки дозирования и установки могут достигать каждой точки всего полупространства над монтажным основанием. Само устройство 3D-MID крепится на держателе при помощи специального адаптера. Два варианта реализации модулей оснащения приведены на рис. 8.
(а)
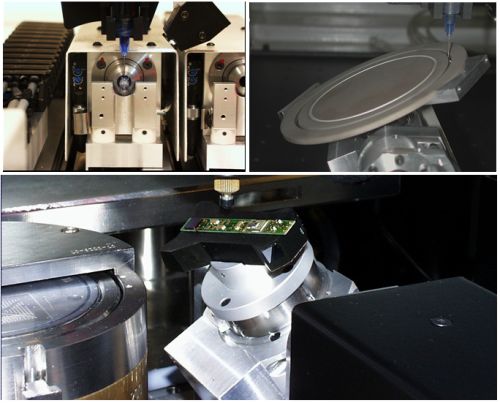
(б) Рис. 8. 3D-держатели монтажных оснований – два варианта реализации (а, б). Источник: [9]. Головка оснащается автоматически сменяемыми насадками для установки различных компонентов, вторая головка выполняет дозирование материала из картриджей объемом 5 – 10 мл. Процесс установки компонентов представлен на рис. 9.
Рис. 9. Процесс установки компонентов в системе VICO 520 M. Источники: [7, 9]. Таблица 2. Некоторые технические характеристики системы VICO 520 M
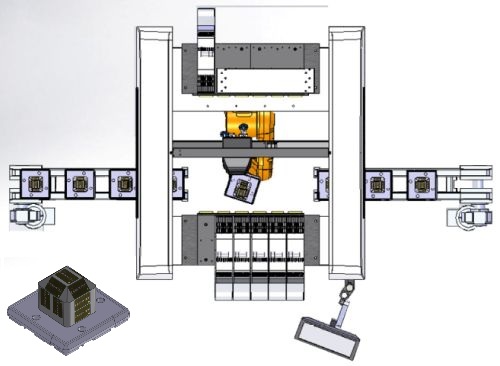
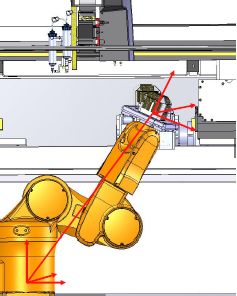
Интеграция многоосевого робота в существующий автомат 2D-установки компонентовОдним из очевидно перспективных направлений является расширение кинематических возможностей обычного автомата 2D-установки компонентов с помощью интеграции в его структуру многоосевого робота, манипулирующего держателем с закрепленным на нем устройством 3D-MID. Примером такого подхода служит реализация автомата 3D-установки компонентов в компании Essemtec на основе платформы автоматов Paraquda в сотрудничестве с известной компанией-производителем роботизированных систем KUKA [3]. Концепция построения автомата приведена на рис. 10. Устройство 3D-MID устанавливается на паллету, которая перемещается по конвейеру технологической линии и далее – по конвейеру сборочного автомата. Робот, установленный на станине автомата и располагающийся под зоной сборки, захватывает паллету с конвейера и подает ее в рабочую зону под головкой дозирования пасты/установки компонентов, поворачивая паллету таким образом, чтобы установочная поверхность была перпендикулярна оси Z перемещения насадки с компонентом или наконечника дозатора.
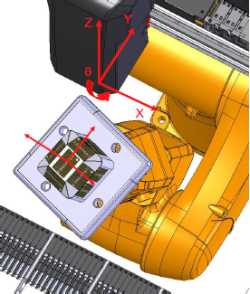
Рис. 10. Концепция построения автомата 3D-установки компонентов с интегрированным роботом-манипулятором. Источник: [3]. При этом 4 оси (X, Y, Z, θ) обеспечивает традиционная система установки компонентов, а дополнительные 6 осей – робот, в результате чего появляется возможность реализовать для устройства 3D-MID все степени свободы – поступательное движение по осям X, Y, Z и вращение вокруг них (рис. 11).
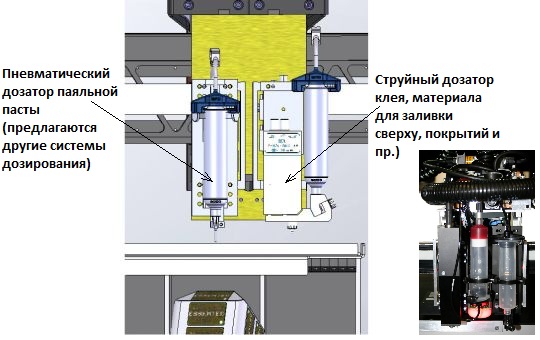
Рис. 11. Система установки компонентов и робот с осями своих систем координат. Источник: [3]. Система оснащена пневматическим дозатором нанесения паяльной пасты и струйным – нанесения клея, материалов для заливки сверху, покрытий и пр. (рис. 12). На одной головке можно установить до двух систем дозирования. Вместо пневматического дозатора может устанавливаться дозатор шнекового типа. После установки компонента осуществляется отверждение адгезива при помощи встроенного в сборочную головку светодиодного устройства УФ-отверждения.
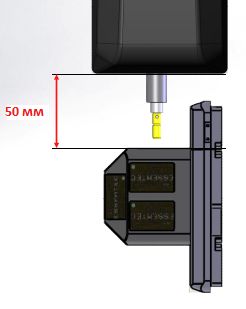
Рис. 12. Дозаторы для нанесения паяльной пасты, клея и прочих материалов. Источник: [3]. Отмечается самая большая величина перемещения оси по оси Z среди автоматов установки SMD-компонентов – вплоть до 50 мм (рис. 13) [3].
Рис. 13. Схема перемещения оси Z автомата 3D-установки компонентов. Источник: [3]. Для составления управляющих программ автомата предлагается соответствующее программное обеспечение, автоматически создающее программу на основе данных, полученных от специализированного MID-модуля САПР NEXTRA® (рис. 14).
Рис. 14. Изображение модели устройства 3D-MID и данных управляющей программы на экране монитора автомата. Источник: [3]. Таблица 3. Некоторые технические характеристики концепта автомата от компании Essemtec
Разработчик отмечает [3], что при проектировании устройств 3D-MID с учетом технологичности необходимо учитывать:
Для обеспечения точности в каждом монтажном слое основания следует предусматривать реперные знаки, как и на традиционных печатных платах. 
|
|




|
© “Элинформ” 2007-2026. Информационный портал для производителей электроники: монтаж печатных плат, бессвинцовые технологии, поверхностный монтаж, производство электроники, автоматизация производства  |