|
|
Скоро!Событий нет.
|
Главная » Новости » Новости перспективных технологий » Исследователи научили робота-манипулятор ловко ловить летящие предметы
Новости перспективных технологий16 мая 2014
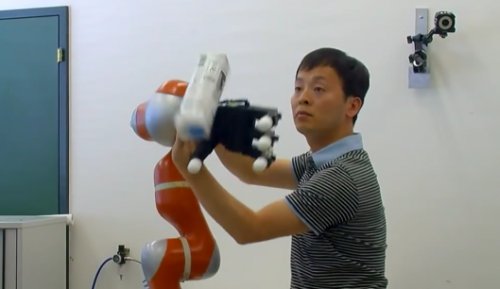
Исследователи научили робота-манипулятор ловко ловить летящие предметыИзображения с сайта www.dailytechinfo.org
Группа исследователей из Швейцарского федерального политехнического университета Лозанны (Swiss Ecole Polytechnique Federale de Lausanne, EPFL) разработала программное обеспечение, предназначенное для промышленного робота-манипулятора Baxter, при помощи которого этот робот способен обрабатывать в режиме реального времени данные, получаемые с камер и ловить летящие с высокой скоростью объекты, тратя на обработку данных только доли секунды. Алгоритм программного обеспечения был разработан специалистами Лаборатории обучающихся систем и алгоритмов (Learning Algorithms and Systems Laboratory, LASA), и при его помощи робот обрел способность точно определять форму, траекторию движения летящего объекта и высчитывать наиболее удачную точку перехвата объекта с учетом динамических характеристик самого манипулятора. Для обучения робота ловле летящих объектов исследователи использовали так называемую методику «программирования инструкциями». Эта методика используется компанией Baxter и другими компаниями для обучения промышленных роботов выполнению определенных задач. Такая технология программирования заключается в перемещении 1,5-метрового манипулятора в назначенные точки по определенной траектории при помощи системы ручного управления по командам человека-оператора. Система управления роботом запоминает все совершаемые им движения и это отдаленно напоминает то, как человек учится выполнять различные действия.
Для отслеживания летящих объектов робот использует несколько камер, данные с которых позволяют его системе создать точную трехмерную модель летящего объекта и траектории его полета в режиме реального времени. Во время испытаний робот успешно справился с ловлей наполовину полной бутылки с водой, молотка и теннисной ракетки. Асимметричная форма объектов, необходимость ловли некоторых объектов за определенные части, к примеру, за ручку молотка или ракетки, делают задачу ловли объектов намного более сложной, чем простые расчеты траекторий движений. Но система управления робота, обладающая высоким быстродействием, успешно справилась со всем этим, потратив на предварительную обработку данных не более пяти сотых секунды. Од Биллар (Aude Billard), исследователь, принимавший участие в данной работе, сообщил, что такая вновь обретенная способность роботов может успешно использоваться в промышленности, в системах обеспечения безопасности и в космосе для сбора космического мусора, к примеру. «Кроме этого, робот может быть использован для страховки людей, которые рискуют упасть, или для ловли объектов, которые могут упасть на человека. А такие случаи с большим процентом вероятности могут произойти на любой строительной площадке». Информация с сайта www.dailytechinfo.org со ссылкой на www.gizmag.com. 
|
|

|
© “Элинформ” 2007-2026. Информационный портал для производителей электроники: монтаж печатных плат, бессвинцовые технологии, поверхностный монтаж, производство электроники, автоматизация производства  |